Hauptseminar
RoboCup
Thema
Kooperative, mobile Roboter
Zusammenfassung
Schnell, billig und außer Kontrolle.
Das ist das Motto von Rodney Brooks, der sich mit seinem Team am MIT
mit kooperativen Robotern befasst.
Ein Überblick über diese und andere Vorteile der Kooperation
und Gründe zur Forschung auf dem Gebiet
wird in dieser Ausarbeitung zusammengestellt.
Sommersemester 2000
Universität Stuttgart
Fakultät Informatik
IPVR
Name
Uwe-Philipp Käppeler
Betreuer
Dipl.-Inf. M. Schulé
Prof. Dr. P. Levi
1 Einleitung
Um ferne Planeten zu erkunden benötigt man autonome Roboter. Ferngesteuerte
Roboter würden auf dem Mars erst 45 Minuten nachdem sie das Bild eines
Hindernisses zur Erde geschickt haben eine Reaktion von der Erde empfangen.
Um 2019 für einen bemannten Flug zum Mars gewappnet zu sein, baut
die NASA in den 80er Jahren den Ambler. Er kostete 2 Millionen Dollar,
wog mehrere Tonnen, war fast 6 Meter hoch und schwer zu transportieren.
Rodney Brooks vom Massachusetts Institute of Technology (MIT) war der Meinung,
daß Unternehmen, die nur einen einzigen Roboter einsetzen, zur Unproduktivität
verurteilt sind. Er schlug vor eine Horde kleiner Roboter zu verwenden.
Die überschaubaren Verhaltensweisen jedes einzelnen Roboters sollten
dazu beitragen ein gemeinsames Ziel zu erreichen - auch dann noch, wenn
einzelne Roboter der Gruppe ausgefallen sind. [5]
Im Juli 1997 schickt die NASA Sojourner, einen einzelnen Roboter, zur
Erkundung der Oberfläche auf den Mars. Trotz mehrerer technischer
Schwierigkeiten konnte Sojourner eingesetzt werden. Geplant war ein Einsatz
von bis zu einem Jahr, der Roboter fiel aber schon nach 30 Tagen wegen
eines Softwarefehlers aus. [6]
An kooperativen Robotern wird immer mehr geforscht, doch bisher gibt
es nur wenige Anwendungen und die Forschung steckt noch in den Startlöchern.
Diese Ausarbeitung zum Seminar beruht auf dem Text Cooperative Mobile
Robotics: Antecedents and Directions [1]. Erkenntnisse und Teilprobleme
dieses großen Forschungsgebietes wurden in diesem Artikel zusammengefasst.
Im Hinblick auf unser Studienprojekt, den RoboCup, sollen hier Hintergrundinformationen
vermittelt werden.
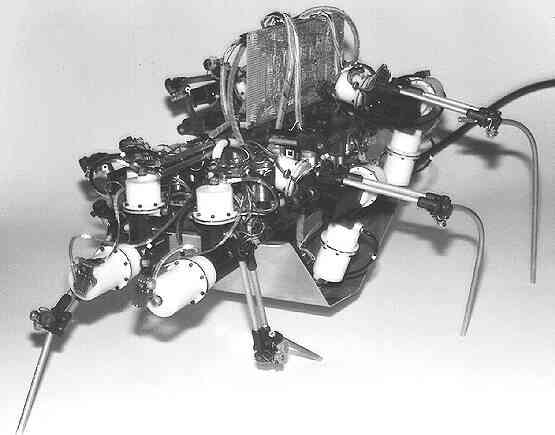
Bild des Boadicea: Ein Roboter, der von Rodney Brooks am MIT gebaut
wurde
2 Forschung, ein Überblick
2.1 Definitionen
Kooperierende Roboter unterscheiden sich von anderen verteilten Systemen
wie PC-Netzwerken hauptsächlich durch die reale Welt, die Umgebung,
in der die Roboter interagieren und mit der sie zurecht kommen sollen.
Die Kooperation der Roboter wird in der Literatur nur knapp definiert:
-
Zusammenarbeit und kombiniertes Verhalten, das auf gemeinsame Interessen
und Ziele gelenkt wird. [2]
-
Eine Art der Interaktion, die für gewöhnlich auf Kommunikation
basiert. [3]
-
Ein Zusammenschluss von Robotern um ein Problem besser lösen zu können
oder bei der Lösung des Problems Zeit zu sparen. [4]
-
Bei gegebener Aufgabe zeigt ein Mehrfachrobotersystem kooperatives Verhalten,
wenn durch einen zugrundeliegenden Mechanismus (zB Kooperation) der Nutzen
des Systems zunimmt. [1]
Diese unterschiedlichen Definitionen beschreiben auch die unterschiedlichen
Forschungsrichtungen, mit denen man sich beschäftigen muss, um an
kooperativen Robotern zu arbeiten: VKI - Verteilte künstliche Intelligenz,
Kommunikation mit Fehlerkorrektur und -Toleranz und Kooperation selbst.
2.2 Motivation
Es gibt mehrere Gründe für die Forschung an kooperierenden Robotern:
-
Lösung komplexer Aufgaben
Es gibt viele Aufgaben, die unmöglich oder nur schwer von einem
einzigen Roboter gelöst werden können. Durch die Zusammenarbeit
sollen im Allgemeinen Probleme auch schneller oder besser gelöst werden.
-
Aufwand
Der Einsatz vieler einfacher Roboter kann billiger, flexibler und fehlertoleranter
sein als der Einsatz eines einzigen komplizierten, mächtigen Roboters,
der fähig sein muss, alle Teilaufgaben zu lösen.
-
Bestandteil verschiedenster Wissenschaften
Durch den konstruktiven Fortschritt mit kooperierenden Robotern hofft
man Rückschlüsse und Anhaltspunkte für Sozialwissenschaften
wie Organisationstheorie, Ökonomie und Psychologie oder für Wissenschaften
wie der theoretischen Biologie oder der Verhaltensforschung von Tieren
zu erhalten.
2.3 Vom ersten kooperativen Roboter bis zum RoboCup
In den 40er Jahren baute Walter Grey schildkrötenähnliche Roboter,
die mit Licht und Berührungssensoren ausgestattet waren. Dies hatte
zur Folge, daß sie auf Bewegungen gegenseitig reagierten. In weiteren
Versuchen wurden Roboter mit Lampen ausgestattet, die dann von anderen
verfolgt wurden.

Die Shildkröten von Grey sahen dieser
LOGO-Schildkröte sehr ähnlich
Dann wurde auf dem Gebiet der verteilten, künstlichen Intelligenz
(VKI) geforscht. Bis in die 90er Jahre wurden Roboter dazu hauptsächlich
simuliert um ganze Schwärme zu beobachten und zu programmieren. Oft
wurden dann hinterher noch Roboter gebaut um die Theorien aus den Simulationen
zu überprüfen. Dazu wurden aber selten mehr als 3 Roboter angefertigt.
Die größte Gruppe, die bis 1995 zu Forschungszwecken realisiert
wurde bestand aus 20 Robotern [1].
Grafik einer Polyworld-Simulation
Seit den 80ern macht die Forschung an mobilen, kooperativen Robotern
große Fortschritte. Das geschah hauptsächlich indem man bestimmte
Aufgaben spezifizierte und diese dann zu lösen versuchte. Ein paar
dieser Aufgaben werden im nächsten Kapitel vorgestellt. Auch der RoboCup
ist eine dieser gestellten Aufgaben, die im Moment weltweit bearbeitet
wird und sich zu einem anerkannten Testfeld etabliert [17] . Werden diese
Aufgaben sehr genau spezifiziert, so ist es hinterher im direkten Vergleich
einfach feststellbar, welches die bessere Lösung zu einer Aufgabe
war. Dazu gibt es beim RoboCup die verschiedenen Meisterschaften, die immer
wieder neu ausgetragen werden.
2.4 Aufgaben und Anwendungen
Dieses Kapitel soll einen kleinen Überblick der Aufgaben verschaffen,
die neben dem RoboCup dazu dienen sollen die Forschung auf dem Gebiet der
kooperativen mobilen Roboter voranzutreiben.
Geplante Anwendungen kooperativer Roboter sind unter anderem die Minensuche,
die Landkartenerstellung oder der Zusammenbau von Objekten. Zur Durchführung
aller Anwendungen werden die folgenden Grundaufgabentypen benötigt.
2.4.1 Verkehrskontrolle
Agieren mehrere Roboter in einer gemeinsamen Umgebung, so müssen sie
Kollisionen vermeiden. Verkehrsregelung und Kollisionsvermeidung kann als
eine Art Ressourcenkonflikt betrachtet werden. Dieses Problem kann durch
Verkehrsregeln oder Kommunikation gelöst werden. Auch die Wegplanung
zählt zu diesem Bereich. Es handelt sich um geometrische Probleme.
Ein Roboter muss dazu seine gesamte Umgebung beachten.
2.4.2 Kistenschieben
Auch als Sofaschieben bekannt. Hier geht es um Aufgabenbestimmung, Fehlertoleranz
und Lernen beim schieben von Objekten. Kooperation kann hier sehr wichtig
sein, wenn zum Beispiel ein Objekt geschoben werden muss, das so schwer
ist, daß es ein einzelner Roboter mit seiner Kraft nicht bewegen
kann. Diese Aufgaben sind auch dadurch interessant, daß es sehr verschiedene
Lösungsansätze gibt. Die Roboter können dabei zum Beispiel
kommunizieren. Das Gegenteil dazu ist ein Ansatz, bei dem sich die Roboter
überhaupt nicht bewusst sind, daß sie gerade mit anderen zusammen
am gleichen Problem arbeiten.

http://www.dfki.de/pas/dmass/forks.gif
Deutsches Forschungszentrum
für Künstliche Intelligenz GmbH [16]
2.4.3 Fütterung
Eine Gruppe von Robotern sammelt Objekte ein, die in ihrer Umgebung verteilt
sind. Anwendungen zu diesen Aufgaben sind das Aufräumen von giftigem
Abfall, Suchen und Retten sowie die Ernte. Diese Aufgaben können von
den Robotern auch einzeln gelöst werden. Die Frage ist, wie mehrere
Roboter zusammen die Aufgaben besser lösen. Auch hier sind die Lösungsansätze
sehr verschieden und reichen von zufälligem Absuchen und Sammeln bis
hin zu Bewegungen in Formationen, die die zu sammelnden Objekte auf ein
Ziel zuschieben.
MinDART Studie [12]
3 Teilgebiete der Forschung
3.1 Gruppenarchitektur
3.1.1 Zentral / Dezentral
Die grundlegendsten Architekturmerkmale einer Gruppe von Robotern werden
durch die Wahl zwischen einer zentralen oder dezentralen Organisation festgelegt.
Bei einer dezentralen Architektur wird außerdem entschieden, ob sie
hierarchisch oder anarchisch organisiert ist.
Schematische Darstellung der Organisationsformen
Eine zentrale Organisation wird von einer einzigen Einheit gesteuert.
Bei der Dezentralen Organisationen fehlt diese alles steuernde Einheit.
Dabei sind in einer anarchischen Organisation alle Agenten gleichberechtigt.
In einer hierarchischen Organisation sind Teile des ganzen Zentral gesteuert.
Es wird oft behauptet, daß eine dezentrale Organisation mehrere
Vorteile, wie zum Beispiel ein hohes Maß an Robustheit und Ausfallsicherheit,
gegenüber einer zentralen Organisation hat [16] . Es gibt aber bis
heute keine empirischen oder theoretischen Beweise dafür. [7] Gesucht
sind vor allem Vergleiche zwischen diesen Organisationen im Bereich von
kleinen Gruppen wie zum Beispiel 2 Robotern, die eine Kiste verschieben.
In der Praxis wird häufiger die dezentrale Organisation eingesetzt.
Aber selten lässt sich eine Organisation von Robotergruppen exakt
der einen oder anderen Form zuordnen. Meist gibt es auch in der dezentralen
Organisation die Möglichkeit, daß ein Roboter unter bestimmten
Umständen die Führung übernehmen kann. [8]
3.1.2 Differenzierung
Man unterscheidet zwischen homogenen Gruppen von Robotern die völlig
identisch sind und heterogenen Gruppen, die verschiedene Individuen enthalten.
In der Literatur werden hauptsächlich die homogenen Gruppen behandelt.
Parker [9] führte das Konzept der Aufgabenüberdeckung ein.
Damit wird beschrieben, wie gut ein bestimmtes Individuum der Gruppe für
eine Aufgabe geeignet ist. In homogenen Gruppen hat die Aufgabenüberdeckung
ihr Maximum. Je heterogener eine Gruppe ist, desto mehr nimmt die Aufgabenüberdeckung
ab. Im Extremfall ist nur noch ein einziger Roboter einer Gruppe fähig
eine bestimmte Aufgabe zu lösen.
In heterogenen Systemen kann eine Aufgabenteilung schon durch die Fähigkeiten
der Gruppenmitglieder festgelegt sein. Beim RoboCup ist zum Beispiel der
Torwart oft etwas anders aufgebaut als die Feldspieler um das Tor besser
verteidigen zu können, indem er sich seitlich bewegen kann. In homogenen
Systemen wie den Feldspielern unter sich dagegen gibt es Rollen, die zur
Laufzeit dynamisch verteilt werden wie Torschütze und Rückendecker,
sowie Rollen, die schon bei der Entwicklung des Systems festgelegt werden
können wie Angreifer und Verteidiger.
3.1.3 Kommunikationstrukturen
In [1] sind über 20 Verweise zu anderen Ausarbeitungen zum Thema Kommunikation
angegeben. Da fast alle Robo-Fußballer bereits mit einem Standard-Funknetz
ausgerüstet sind, wird auch hier wieder nur ein grober Überblick
über die verschiedenen Möglichkeiten aufgezeigt.
-
Interaktion durch die gemeinsame Umgebung
Dies ist die einfachste und zugleich am meisten eingeschränkte
Art der Interaktion. In der Literatur ist sie auch als Interaktion ohne
Kommunikation bekannt. Es gibt keine direkte Interaktion zwischen den Agenten.
Die Umgebung der Roboter ist hier das Übertragungsmedium, wobei hierfür
in der Praxis häufig einfach ein gemeinsamer Speicher verwendet wird.
-
Interaktion durch Sensoren
Auch hier findet die Kommunikation nicht auf direktem Wege statt. Die
Sensoren der Roboter werden als Empfänger eingesetzt. Damit dieses
Konzept funktioniert muss jeder Roboter die anderen Roboter erkennen und
untereinander und von der Umwelt unterscheiden können. Dies wird in
der Literatur kin recognition genannt [3].
Auf Grund der begrenzten Möglichkeiten der Hardware wird die Interaktion
durch Sensoren oft per Funk oder Infrarot simuliert.
-
Interaktion durch Kommunikation
Man unterscheidet zwischen direkter Kommunikation, bei der immer ein
Agent einen anderen direkt anspricht, und dem Broadcasting, wobei ein Agent
alle anderen gleichzeitig anspricht. Bei dem Broadcasting gibt es die Möglichkeit,
daß der Sender seine Empfänger alle kennt oder daß er
überhaupt nicht weiß, wer ihm gerade zuhört.
Schematische Darstellung der Kommunikationsformen
Außerdem gibt es Kommunikationsstrukturen, die speziell für
Multirobotersysteme entwickelt wurden, wie das Sign-Board [11]. Die meisten
Kommunikationsarchitekturen ähneln jedoch oft PC-Netzwerken oder übernehmen
deren Protokolle gänzlich. PC-Netzwerke sind leistungsstark, verbreitet
und billig. So lohnt es sich in Robotern Standard-Hardware einzusetzen.
Besitzt die Kommunikationshardware der einzelnen Roboter nur eine begrenzte
Reichweite so können Ketten gebildet werden. Empfangene Signale werden
von jedem Roboter an den nächsten weitergegeben und so wird die Reichweite
des einzelnen vergrößert [10].
3.1.4 Modellbildung anderer Agenten
Modelle von Intentionen, Aktionen, Fähigkeiten und Zuständen
anderer Roboter können zu einer Reduktion der Kommunikation führen.
So können zum Beispiel bei der Wegplanung zukünftige Positionen
anderer Roboter berechnet oder vermutet werden. Eine mögliche Kollision
kann dann durch Kommunikation verhindert werden.
3.1.5 Repräsentative Architekturen
In diesem Abschnitt werden einige Standardarchitekturen vorgestellt.
-
CEBOT (CEllular roBOTics system)
Cebots besitzen eine dezentrale, hierarchische Architektur. Das System
wurde an natürliche Vorbilder angelehnt. Hier gibt es Meisterzellen,
die mit anderen Meisterzellen kommunizieren. Andere Zellen richten ihre
Aktionen nach den eigenen Zielen und den Zielen ihrer Meisterzelle. An
dieser Architektur wurden verschiedene Kommunikationsstrukturen getestet.
Um die Kommunikation zu minimieren wurde eine binäre Hierarchie unter
den Meisterzellen geschaffen.
-
ACTRESS (ACTor-based Robot and Equipment Synthetic System)
Dieses heterogene System besteht aus 3 Robotern und 3 Workstations.
Eine Workstation dient als Schnittstelle zum Menschen, eine zur Bildverarbeitung
und eine als globaler Manager. Man untersuchte auch an diesem System verschiedene
Kommunikationsarchitekturen beim Lösen von Kistenschieb-Problemen.
[13]
-
SWARM (Schwarm)
Swarm entstand aus Cebot. Der unterschied besteht in der großen
Anzahl an einfachen identischen autonomen Robotern mit primitiven Kommunikationsfähigkeiten.
Jede Zelle reagiert auf die Zellen in nächster Nähe. Aus vielen
unintelligenten Teilen soll so ein Schwarm mit kollektivem, intelligentem
Verhalten entstehen.
-
GOFER
Gofer ist ein System mehrerer mobiler Roboter und einem zentralen Planungs-System.
Das Zentrale Planungssystem hat den Üuberblick über alle verfügbaren
Roboter, deren Umgebung und über alle Aufgaben, die gelöst werden
müssen. Nachdem eine Lösung gefunden wurde, wird sie allen Robotern
mitgeteilt. Jeder einzelne Roboter erfüllt dann die ihm zugeteilten
Aufgaben.
Gofer wurde erfolgreich getestet. Aufgaben wie Kistenschieben und Verfolgungen
wurden mit 3 Robotern gelöst.
3.2 Resourcenkonflikt
Ressourcenkonflikte treten auf, sobald sich Roboter einen gemeinsamen Raum,
manipulierbare Objekte oder Kommunikationsmedien teilen. Wie bereits erwähnt
werden zur Kommunikation meist Standardkomponenten und Protokolle verwendet,
da diese bereits ausgereift sind. Bei der Wegplanung hat man es dagegen
nicht so leicht. Mehrere Studien sind zu dem Schluss gekommen, dass eine
Planung der Wege aller Roboter einer Gruppe im Voraus einfach nicht möglich
ist. Auch bei fußballspielenden Robotern ist die Wegplanung eine
wichtige Aufgabe.
Lösungen wurden in der Forschung vor allem für Verkehrssysteme
gesucht. Um Kollisionen und gegenseitiges Blockieren, das zum Stillstand
führt, zu vermeiden, reichen schon ein paar wenige einfache Verkehrsregeln
wie [14] :
-
Halte Dich rechts
-
Halte an, wenn Dein Weg gekreuzt wird
-
Halte genügend Abstand zum Vordermann
Systeme, die sich nicht auf vorgegebenen Straßen fortbewegen, benötigen
kompliziertere Algorithmen, die zum Beispiel mit einem globalen Raum-Zeit-Modell
und einem iterativen Vorgehen der Roboter arbeiten. Im Raum-Zeit-Modell
wird die aktuelle Umgebung nachgebildet und vermutet, wie sie in der näheren
Zukunft aussehen wird. Jeder einzelne Roboter wiederholt die folgenden
Schritte immer wieder [15] :
-
Aktualisiere die eigene Position und deine Umgebung im Raum-Zeit-Modell
-
Berechne Kollisionsrisiken aus dem Modell
-
Generiere einen modifizierten Weg aufgrund der Kollisionsrisiken
Der modifizierte Weg wird meist ermittelt, indem der Roboter das erkannte
Hindernis so umgeht, daß er den kleinsten Umweg antreten muss [18]
. Werden die Iterationen schnell hintereinander durchgeführt, so kann
auch einem sich bewegenden Hindernis effektiv ausgewichen werden.
3.3 Ursprung der Kooperation
Bisher wurde die Kooperation von Robotern fast immer künstlich geschaffen.
Interessanter wäre jedoch eine Kooperation, die zwischen egoistischen
Robotern entsteht, sobald diese ohne menschliche Hilfe erkennen, daß
sie ihre Aufgaben zusammen effektiver lösen können.
In der Natur gibt es dazu zwei unterschiedliche, beobachtbare Verhaltensstrukturen.
Soziales Verhalten, wie es zum Beispiel bei Ameisen beobachtet werden kann,
und kooperatives Verhalten. Beim Sozialen Verhalten ist die Kooperation
der einzelnen schwachen Individuen genetisch festgelegt. Sie ist nötig
zum Überleben der ganzen Gruppe.
Kooperatives Verhalten von höheren Tieren dagegen beruht auf dem
intuitiven Wunsch der Interaktion, um daraus eigenen Nutzen zu ziehen.
3.4 Aufgabenteilung
Bisher gibt es nur wenige Arbeiten zur Aufgabenteilung unter kooperativen
Robotern. Die meisten Anwendungen wie Fütterung und Kistenschieben
sind zu einfach um hier nach komplexen Lösungen zu suchen.
Dazu kommt, daß die Aufgabenteilung auch stark von der zentral
oder dezentral organisierten Gruppenarchitektur abhängt. Außerdem
spielen geometrische Gegebenheiten bei der Aufgabenteilung eine große
Rolle. Besonders beim Roboterfußball, bei dem die einzelnen Agenten
je nach Spielsituation die Roboter der eigenen Mannschaft unterstützen
oder die Gegnerischen behindern können.
3.5 Geometrische Probleme
Im Unterschied zu den anderen Teilproblemen geht es bei den geometrischen
Problemen um die Einbindung der sich bewegenden Roboter in eine 2- oder
3-dimensionale, physische Umwelt. Auf die Probleme der Wegplanung wurde
in dieser Ausarbeitung bereits eingegangen.
Weitere Schwerpunkte der geometrischen Probleme sind das Bilden von
Formationen und das Marschieren in diesen. Lange Zeit gab es keinen Algorithmus
für verteilte Architekturen, der die Agenten dazu bringt, zusammen
einen Kreis zu formen. Uny Cao, Fukanaga und Kahng [1] machten erstmals
einen Vorschlag, wie dieses Problem theoretisch gelöst werden kann.
Um Formationen während der Fortbewegung einer Gruppe einzuhalten
werden meist Ansätze mit Führern und Verfolgern verwendet. Schwierig
ist hierbei wieder die Hindernisvermeidung, die zentral vom Führer
beachtet werden muss.
Auch im RoboCup gibt es Mannschaften, deren Roboter während dem
Spiel Formationen bilden. Hat ein Spieler den Ball und ist im Angriff,
so wird er oft von einem Mitspieler begleitet, der ihm Rückendeckung
gibt.
4 Zukunft der Forschung
4.1 Technologische Einschränkungen
Die begrenzten technischen Möglichkeiten bremsen die Forschung an
Robotern. Dadurch, daß die gängige Roboter-Hardware extrem unzuverlässig
ist, ist es sehr schwierig, eine ganze Gruppe von Robotern funktionstüchtig
zu halten.
Die Forschung anhand von Simulationen umgeht die technischen Schwierigkeiten
gänzlich. Auf diesem Wege lassen sich mehr Experimente durchführen,
als mit echten Robotern möglich wäre. Doch kann der rein theoretische
Ansatz auch dazu führen, daß ein in einer Simulation erfolgreich
getestetes System in der Realität unumgänglich zu einem Misserfolg
führt.
Heute ist es kein Problem mehr, mit Multirobotersystemen aus 10 bis
20 Individuen zu arbeiten. Doch auch in der näheren Zukunft wird es
unmöglich bleiben, kollektives Massenverhalten an Hunderten oder Tausenden
von echten Robotern zu studieren. Um Schritte in diese Richtung unternehmen
zu können, versucht man einzelne Roboter so klein wie nur möglich
zu konstruieren.
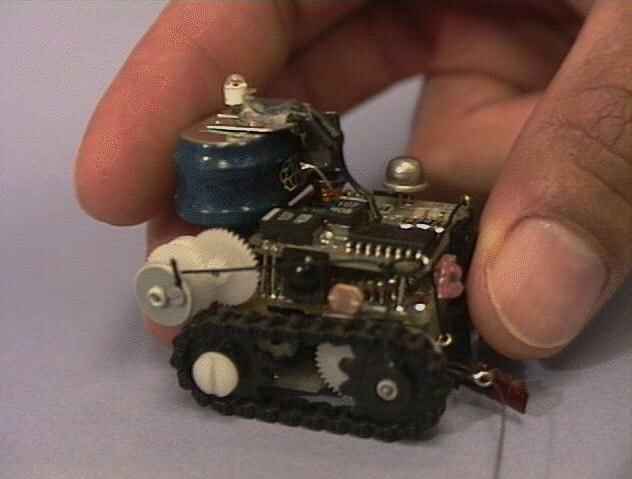
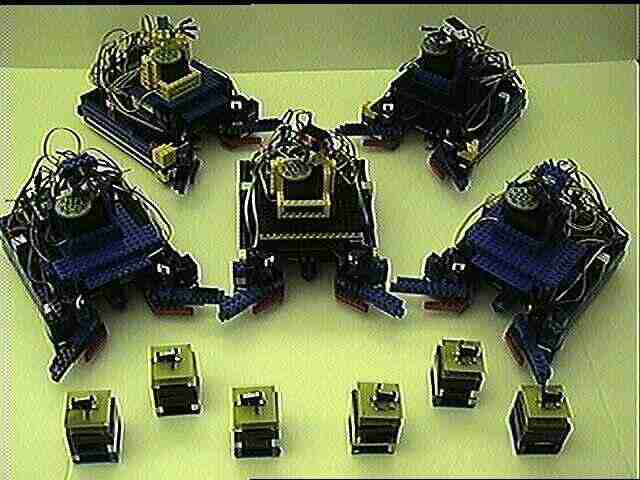
Ein extrem kleiner Roboter vom MIT ist diese Ameise
Ameisen-Roboter werden am MIT erfolgreich für Forschung an Fütterungsaufgaben
verwendet. Doch selbst die Einzelteile einer dieser winzigen Roboter kosten
300$, Laborkosten nicht inbegriffen [19] .
4.2 Offene Forschungsgebiete
Es gibt viele Teilgebiete der Forschung an Robotern, die noch so gut wie
unerforscht sind. Da diese Wissenschaft noch jung ist, war sie bisher hauptsächlich
informell und konzeptorientiert. So fehlen bisher zum Beispiel formale
Metriken um die Kooperation von Systemen zu messen.
Es gibt auch Teilprobleme, die theoretisch bereits gelöst sind,
doch bei der Umsetzung in die Praxis auf Schwierigkeiten stoßen,
wie das Problem des Bildens einer Formation. Dieses wurde geometrisch optimal
gelöst, wobei Aspekte wie Fehlertoleranz und Führerwahl noch
ungeklärt sind.
Wissenschaften, die das Wachstum der kooperativen Roboter noch beträchtlich
beeinflussen können, sind:
-
Verteilte, künstliche Intelligenz
Bei der Forschung an verteilten Systemen, künstlicher Agenten
gibt es zwei Hauptrichtungen: Verteiltes Lösen von Problemen (VLP)
und Multiagentensysteme (MAS).
VLP besteht aus drei Phasen: Problemzerlegung, Lösen von Teilproblemen
und Zusammenfügung der Teillösungen. Die Kooperation der einzelnen
Agenten wird hier bereits vorausgesetzt.
MAS beschäftigt sich mit der Kooperation von Agenten, deren Ziele
miteinander in Konflikt treten. Man geht nicht von gütigen Agenten
aus, sondern von konkurrierenden. Der Unterschied zu Agenten aus Schwärmen
liegt in der höheren Intelligenz eines einzelnen Agenten von MAS.
Geforscht wird hier mehr in der Theorie.
-
Verteilte Systeme
Mehrfachrobotersysteme sind spezielle verteilte Systeme. Kommunikation
und Ressourcenverteilung machen die Schwerpunkte dieses Forschungsgebietes
aus. Fortschritte hierbei können direkt in Systemen kooperierender
Roboter umgesetzt werden. Ziel ist es, die einzelnen Agenten so einfach
wie möglich zu halten, Kommunikation und Sensorauswertung auf ein
Minimum zu reduzieren und trotzdem durch die Kooperation ein optimales
Verhalten des ganzen Systems zu erreichen.
-
Biologie
Die Natur dient oft als Vorbild bei der Entwicklung von kooperativen,
mobilen Robotern. In der wirklichen Welt existieren Insektenkolonien, die
aus sehr einfachen Individuen bestehen. Die kognitiven Fähigkeiten
von Ameisen oder Bienen zum Beispiel sind sehr beschränkt. Doch durch
die hohe Reaktivität der einzelnen Individuen entsteht ein komplexes
Verhalten der ganzen Gruppe. Die weite Verbreitung und Überlebensfähigkeit
dieser Insekten zeugt von einer hohen Effektivität der Kooperationen.
Auch beim künstlichen Lernen oder Optimieren von Algorithmen dient
die Natur als Vorbild.
5 Fazit
So lustig es aussehen mag Roboter fußballspielen zu lassen, es dient
der Wissenschaft und soll die einzelnen Forschungsgebiete der kooperativen
mobilen Roboter vorantreiben. Fast alle dieser Forschungsgebiete sind bei
der Konstruktion einer Roboterfußballmannschaft im Einsatz. Ergebnisse
von Mannschaftsspielen stellen eine der wenigen Metriken dar, die man heute
auf dem Gebiet der Kooperation überhaupt hat.
Die ganze Forschung an mobilen kooperativen Robotern steckt noch in
den Kinderschuhen. Ebenso wie die Technologie, die dazu zur Verfügung
steht.
Referenzen
-
[1]
-
Y. Unycao, Alex S. Fukunaga, Andrew B. Kahng: Cooperative Mobile Robotics:
Antecedents and Directions; Los Angeles, July 27, 1997
-
[2]
-
D. Barnes, J. Gray: Behaviour synthesis for co-operant mobile robot control
pp 1135-1140; 1991 - Zitat aus [1]
-
[3]
-
M. Mataric Interaction and intelligent behaviour; MIT, 1994 - Zitat aus
[1]
-
[4]
-
S. Premvuti, S. Yuta: Consideration on the cooperation of multiple autonomous
mobile robots; 1990 - Zitat aus [1]
-
[5]
-
Steven Levy: Künstliches Leben aus dem Computer; 1992
-
[6]
-
Rhein-Zeitung: http://rhein-zeitung.de/old/97/07/08/topnews/marschem.html
-
[7]
-
L. Steels: Simulation of adaptive behaviour; 1994 - Zitat aus [1]
-
[8]
-
O. Causse and Pampagnin: Management of a multirobot system in a public
environment; 1995 - Zitat aus [1]
-
[9]
-
L. E. Parker: Heterogeneous muti-robot cooperation; MIT, 1994
-
[10]
-
S. Ichikawa: Cooperative routesearching behaviour of multi-robot system
using hello-call communication; 1993 - Zitat aus [1]
-
[11]
-
J. Wang, G. Beni: Distributed computing problems in cellular robotic systems;
1990 - Zitat aus [1]
-
[12]
-
http://www.cs.umn.edu/Research/airvl/mindart/
-
[13]
-
H. Asama, A. Matsumoto, Y. Ishida: Design of an autonomous and distributed
robot system: ACTRESS; 1989 - Zitat aus [1]
-
[14]
-
S. Kato, S. Nishiyama, J. Takeno: Coordinating mobile robots by applying
traffic rules; 1992 - Zitat aus [1]
-
[15]
-
M. Rude: Cooperation of mobile robots by event transforms into local space-time;
1994 - Zitat aus [1]
-
[16]
-
Deutsches Forschungszentrum für künstliche Intelligenz:
http://www.dfki.de/dfki/forschung.html
http://www.dfki.de/pas/f2w.cgi?dmass/forks-g
-
[17]
-
Thomas Christaller: Autonome intelligente Systeme; GMD, 1998
http://set.gmd.de/de/ais.html
-
[18]
-
D. Yeung, G. Bekey: A decentralized approach to the motion planning problem
for multiple mobile robots. - Zitat aus [1]
-
[19]
-
Rodney Brooks: The Ants: A Community of Microrobots
http://www.ai.mit.edu/projects/ants/
Abbildungsverzeichnis
File translated from TEX by TTH,
version 2.69.
On 12 Dec 2000, 00:49.